- Descrição: O Sensor de Temperatura NTC 10K 3950 Prova D'água…
Como usar com Arduino – Sensor Infravermelho Reflexivo de Obstáculo
– Descrição:
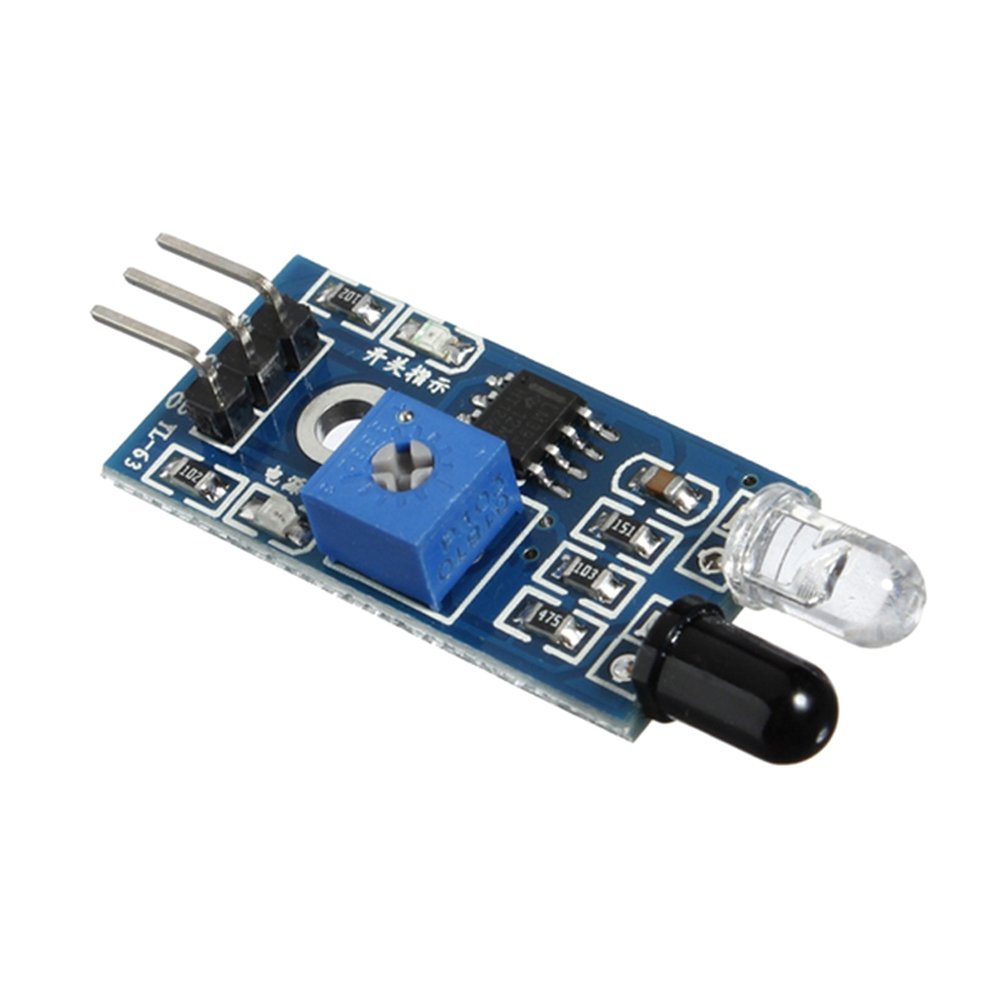
O Sensor Infravermelho Reflexivo de Obstáculo funciona através de um sistema de reflexão infravermelho, onde um LED emissor IR e um fototransistor IR ficam lado a lado e quando um obstáculo ou objeto atravessa dentro do raio de ação de ambos o sensor coloca a saída em nível baixo e um LED verde será aceso na placa indicando presença de um obstáculo ou objeto. Este sensor possui um potenciômetro ajustável para controle da sensibilidade da distância de detecção que pode ficar entre 2cm e 30cm. Vale ressaltar que o tamanho e cor do obstáculo ou objeto influenciam na distância de detecção.
OBS: você pode fazer o ajuste de sensibilidade de detecção do sensor, a partir do trimpot que se encontra na placa.
– Especificações e características:
– Controlador: LM393
– Tensão de operação: 3,3 a 5VDC
– Distância de detecção: 2cm até 30cm
– Faixa de detecção: 35º
– Saída Digital e Analógica
– LED indicador de sensor ativado
– LED indicador de tensão no sensor
– Sensibilidade ajustável através de trimpot
– Aplicações:
Projetos com Arduino ou outras plataformas microcontroladas em que seja necessário fazer a detecção de obstáculos.
– Proposta da prática:
Utilizar o Sensor Infravermelho Reflexivo de Obstáculo em conjunto com o Arduino e quando for detectado um objeto o LED irá acender.
– Lista dos itens necessários:
01 – Arduino com Cabo USB
01 – Sensor Infravermelho Reflexivo de Obstáculo
01 – LED Difuso 5mm Vermelho
01 – Resistor de 150Ω
01 – Protoboard
05 – Cabos Jumper macho-macho
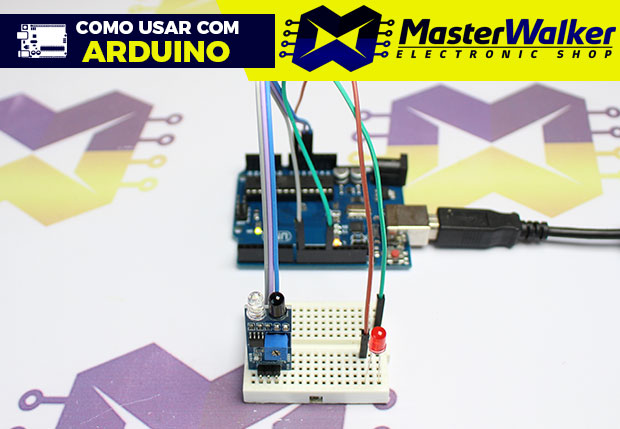
– Esquema de ligação da prática:

– Tutorial de instalação e configuração do ambiente de programação do Arduino:
Arduino – Instalação e Configuração da IDE no Windows
– Código:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 |
const int pinoLed = 12; //PINO DIGITAL UTILIZADO PELO LED const int pinoSensor = 8; //PINO DIGITAL UTILIZADO PELO SENSOR void setup(){ pinMode(pinoSensor, INPUT); //DEFINE O PINO COMO ENTRADA pinMode(pinoLed, OUTPUT); //DEFINE O PINO COMO SAÍDA digitalWrite(pinoLed, LOW); //LED INICIA DESLIGADO } void loop(){ if(digitalRead(pinoSensor) == LOW){ //SE A LEITURA DO PINO FOR IGUAL A LOW, FAZ digitalWrite(pinoLed, HIGH); //ACENDE O LED }else{ //SENÃO, FAZ digitalWrite(pinoLed, LOW); //APAGA O LED } } |
– Resultado final:
Gostou desta prática? Então deixa seu comentário, dúvida ou sugestão aí embaixo!
Loja online: https://www.masterwalkershop.com.br
Fan page no Facebook: https://www.facebook.com/masterwalkershop
Nos ajude a espalhar conhecimento clicando no botão de compartilhar (f Like) que está mais abaixo.
Obrigado e até a próxima!
Seu feedback é muito importante! Que tal dar uma nota para esta postagem?! Faça sua avaliação aqui embaixo.
Próxima postagem: Como usar com Arduino – Módulo Acelerômetro 3 Eixos MMA7361


Parabéns, ótima explicação.
Olá, estou tentando fazer um sensor de obstaculo, mas meus dois sensores varias vezes ficam acessos direto(o led do proprio sensor de obstaculo) como se tivesse detectando algo, os objetos da mesa estão a mais de 30cm de distancia mas mesmo assim ficam acessos diretos.