- Descrição: O Módulo Leitor de Micro SD Card é um componente…

Arduino – Utilizando a função millis
Nesta prática você vai aprender a utilizar a função millis e executar um exemplo de utilização da mesma a partir de um circuito com dois LEDs. Esta função é uma excelente alternativa ao uso do delay.
Delay é o termo técnico usado para designar o retardo de sinais em circuitos eletrônicos. Na programação com Arduino, o delay é utilizado quando se precisa de intervalos entre um comando e outro.
Vale ressaltar que o delay faz a execução do código parar por completo até que o tempo estabelecido seja executado. Se o delay for de 10 segundos então o código vai ficar parado por 10 segundos e em seguida volta a ser executado. Como o código do Arduino é um loop (repetição contínua das instruções), seguindo o exemplo de um delay de 10 segundos, concluímos que toda vez que o loop passar pelo delay, uma interrupção de 10 segundos será executada.
Mas e se o código precisar que um intervalo de tempo seja executado, porém sem que a execução do código seja interrompida?!
Neste este tipo de situação podemos utilizar a função millis. A função irá retornar o tempo em milissegundos desde o momento em que o Arduino foi ligado ou reiniciado. Desta forma, é possível verificar a quanto tempo o programa está em execução e programar ações sem que o código seja interrompido.
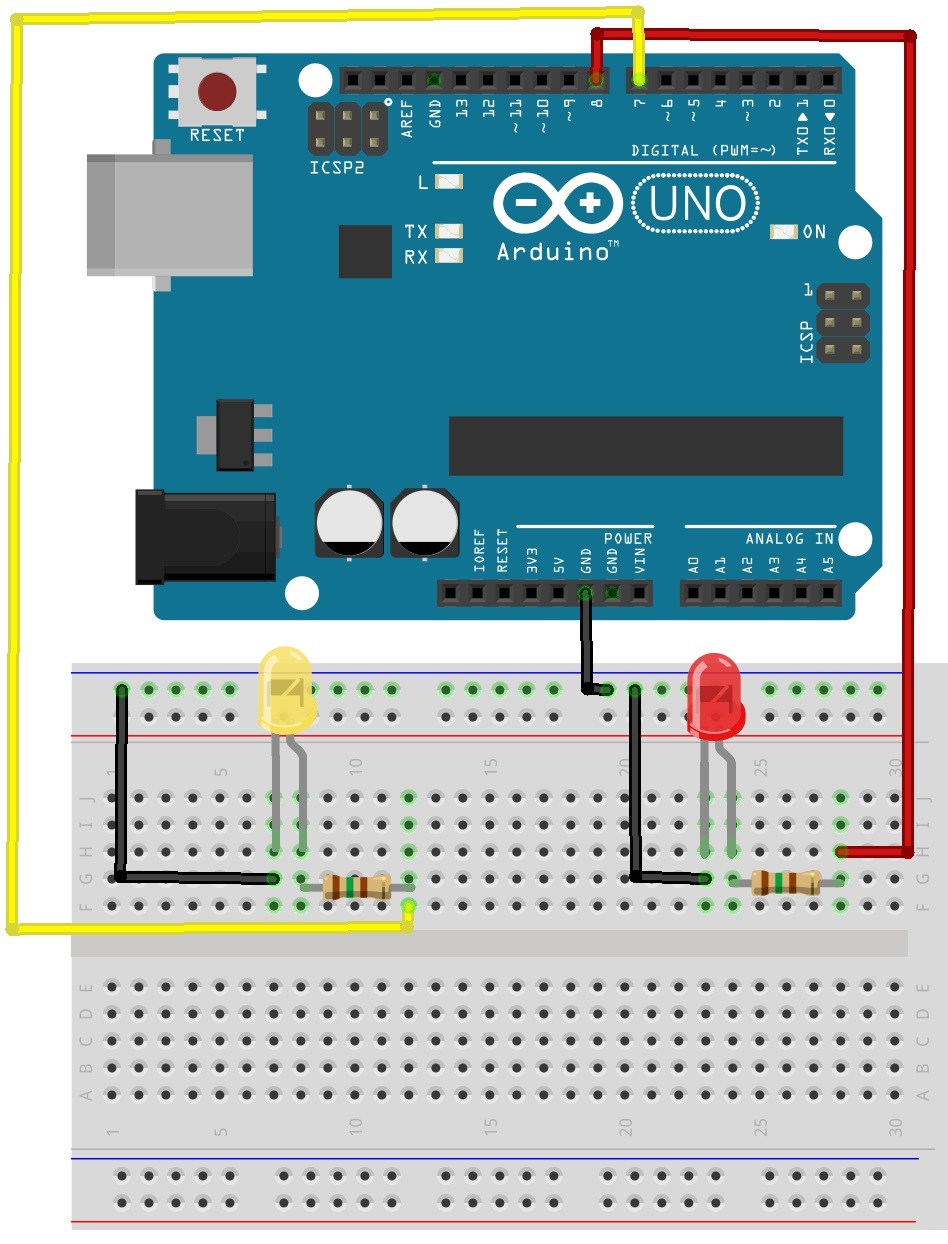
Para demonstrar o uso da função millis, utilizei dois LEDs conectados ao Arduino, onde um dos LEDs vai piscar em intervalos de 2 segundos e o outro vai piscar em intervalos de 500ms. Os dois processos vão ocorrer simultaneamente e sem interrupções.
Você vai precisar dos seguintes itens para execução da prática:
– Arduino
– LEDs
– Resistor 150Ω
– Protoboard
– Cabo Jumper Macho-macho
Monte o esquema de ligação conforme a imagem abaixo:
A seguir, você deverá carregar o código na IDE do Arduino. Se você ainda não instalou a IDE do Arduino, acesse o link abaixo e em seguida retorne para continuar:
Arduino – Instalação e Configuração da IDE no Windows
Conecte o Arduino ao computador, abra a IDE, confira a placa e a porta selecionada e carregue o código na placa:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 |
int pinoLedAmarelo = 7; //DEFINE O PINO DIGITAL EM QUE O LED AMARELO ESTÁ CONECTADO int pinoLedVermelho = 8; //DEFINE O PINO DIGITAL EM QUE O LED VERMELHO ESTÁ CONECTADO int statusLedAmarelo = LOW; //DEFINE QUE O ESTADO INICIAL DO LED AMARELO É DESLIGADO int statusLedVermelho = LOW; //DEFINE QUE O ESTADO INICIAL DO LED VERMELHO É DESLIGADO long previousMillisAmarelo = 0; //VARIÁVEL QUE CONTROLA O TEMPO DO LED AMARELO long previousMillisVermelho = 0; //VARIÁVEL QUE CONTROLA O TEMPO DO LED VERMELHO long amareloLedInterval = 2000; //VARIÁVEL QUE REGISTRA O INTERVALO DO LED AMARELO (2000ms = 2 SEGUNDOS) long vermelhoLedInterval = 500; //VARIÁVEL QUE REGISTRA O INTERVALO DO LED VERMELHO (500ms = 500 MILISSEGUNDOS) void setup(){ pinMode(pinoLedAmarelo, OUTPUT); //DEFINE O PINO COMO SAÍDA pinMode(pinoLedVermelho, OUTPUT); //DEFINE O PINO COMO SAÍDA } void loop() { //INICIO DO CONTROLE DO LED AMARELO unsigned long currentMillisAmarelo = millis(); //VARIÁVEL RECEBE O TEMPO ATUAL EM MILISSEGUNDOS if (currentMillisAmarelo - previousMillisAmarelo > amareloLedInterval) { //SE O TEMPO ATUAL MENOS O TEMPO ANTERIOR FOR MENOR QUE O INTERVALO, FAZ previousMillisAmarelo = currentMillisAmarelo; //TEMPO ANTERIOR GUARDA O TEMPO ATUAL if (statusLedAmarelo == LOW) { //VERIFICA O ESTADO ATUAL DO LED E SE ESTIVER EM DESLIGADO MUDA PARA LIGADO statusLedAmarelo = HIGH; //VARIÁVEL RECEBE ESTADO HIGH(LIGA O LED) } else { //SENÃO, FAZ statusLedAmarelo = LOW; //VARIÁVEL RECEBE ESTADO LOW(DESLIGA O LED) } digitalWrite(pinoLedAmarelo, statusLedAmarelo); //ESCREVE NO PINO DIGITAL O ESTADO ATUAL (LIGADO OU DESLIGADO) } //FIM DO CONTROLE DO LED AMARELO //----------------------------------------------------------------------------------------------------------------------------------------- //INICIO DO CONTROLE DO LED VERMELHO unsigned long currentMillisVermelho = millis(); //VARIÁVEL RECEBE O TEMPO ATUAL EM MILISSEGUNDOS if (currentMillisVermelho - previousMillisVermelho > vermelhoLedInterval) { //SE O TEMPO ATUAL MENOS O TEMPO ANTERIOR FOR MENOR QUE O INTERVALO, FAZ previousMillisVermelho = currentMillisVermelho; //TEMPO ANTERIOR GUARDA O TEMPO ATUAL if (statusLedVermelho == LOW) { //VERIFICA O ESTADO ATUAL DO LED E SE ESTIVER EM DESLIGADO MUDA PARA LIGADO statusLedVermelho = HIGH; //VARIÁVEL RECEBE ESTADO HIGH(LIGA O LED) } else { //SENÃO, FAZ statusLedVermelho = LOW; //VARIÁVEL RECEBE ESTADO LOW(DESLIGA O LED) } digitalWrite(pinoLedVermelho, statusLedVermelho); //ESCREVE NA PORTA DIGITAL 9 O ESTADO DO LED VERDE (HIGH OU LOW) } //FIM DO CONTROLE DO LED VERMELHO } |
Após o arquivo ser carregado, veja os LEDs funcionando simultaneamente, onde um deles muda o estado a cada dois segundos e o outro alterna o estado a cada 500ms. Note que o funcionamento deles é independente e suas ações executam de forma simultânea.
Se tivéssemos utilizado a função delay, o funcionamento dos dois LEDs não seria de forma simultânea, pois primeiro seria necessário executar as ações de um LED para em seguida executar as ações do outro.
Na construção de braços robóticos a partir do uso de servos, a função millis é comumente utilizada, pois para esse tipo de projeto quanto menos interrupções existir no código melhor será o desempenho do braço.
Gostou deste tutorial? Então deixa seu comentário, dúvida ou sugestão aí embaixo!
Loja online: https://www.masterwalkershop.com.br
Fan page no Facebook: https://www.facebook.com/masterwalkershop
Nos ajude a espalhar conhecimento clicando no botão de compartilhar (f Like) que está mais abaixo.
Obrigado e até a próxima!
Seu feedback é muito importante! Que tal dar uma nota para esta postagem?! Faça sua avaliação aqui embaixo.
Postagem anterior: Arduino – Exibindo e lendo dados da serial
Próxima postagem: Arduino – Controle de Servo Motor SG90 9g através de Potenciômetro

Olá, parabéns pelo conteúdo de qualidade.
Estou com uma dúvida, no meu projeto eu quero medir a quanto tempo o Arduino está ligado.
Gostaria de medir assim:
0 dias, 00 horas 00 minutos 00 segundos
E imprimir na serial.
Aí no caso quando ligar o Arduino ele comece a
marcar o tempo.
Vou deixar ele ligado por 1 mês.
Gostaria de marcar esse tempo com precisão. Pensei em usar um RTC
Mas estou perdido.
Pode me dar uma ajuda??
Obrigado
Show de bola a forma que você explicou a função Millis ( ), não achei outro com essa clareza…Parabéns!
Olá Igor.
Agradeço pelo reconhecimento!
Vlw!
Poderia me ajudar com um erro de stray no meu codigo?
if (tempoInicial > (tempoAtual + 90000)){// 90 segundos
ligado = true; //botão de ligar aparece
Serial.println(tempoAtual);
Serial.println((tempoInicial);
}
Olá, ótimo post.
Gostaria de esclarecer uma dúvida em relação ao millis. De certa forma fazendo-se uma analogia, o tempo de intervalo definido como inteiro dos dois leds, seria em específico o delay? Só que atribuindo ao millis.
Olá Márcus.
De certa forma sim, pois o millis nada mais é que intervalo entre uma ação e outra, ou seja, faz a mesma função do delay,
Show muito bom!!
Olá Renato.
Agradeço pelo comentário!
Fico satisfeito em saber que este artigo foi útil.
boa noite amigo, estou projetando uma envasadora de liquido e necessito utilizar essa função.
Voce poderia me dar uma ajuda…
Funcionamento seria mais ou menos assim… vai ter um sensor de nivel em um reservatorio principal no qual ira conter o liquido que vai para os potes menores.
Se nivel do tanque Ok liga uma esteira onde correram as embalagens vazia…
Coloquei no fim da esteira um sensor de barreira… se identificar o pote ele rotaciona um compartimento como se fosse uma roda com 4 posições… até uma segunda posição aonde tem a bomba que vai alimentar as embalagens menores. Além disso, corta a alimentação da esteira.
problema 1 – ele deve rotacionar até a posição da bomba (problema é o tempo que ele fica acionado), quando ele rotaciona a esteira tem que voltar a funcionar.
problema 2 – tempo que a bomba deve ficar acionada, sem rotacionar porem esteira ligada.
vc teria alguma ideia?
Olá Filipe David.
Agradeço pelo seu comentário!
Estude a biblioteca SimpleTimer e veja se ela atende ao que precisa.
Esse esquema da para fazer enquanto um DHT11 vai vendo o tempo e mandando para uma base de dados a cada 10 minutos … um sensor de presença pode ir trabalhando …. e se detectou alguem passando na frente pode mandar um instrução de aviso ?
Olá Paulo.
Até daria, mas há bibliotecas que executam com mais eficácia isto que precisa fazer.
Dê uma olhada: https://github.com/ivanseidel/ArduinoThread