
Nesta prática você vai aprender a utilizar com Arduino a…

Como usar com Arduino – Micro Servo Motor SG90 9g

– Descrição:
O Micro Servo Motor SG90 9g é um item essencial para projetos de robótica, mecatrônica e diversos outros projetos. Na robótica, o servo motor é responsável por movimentar braços, pernas e mãos dos robôs. No automodelismo o servo motor é utilizado para virar as rodas dianteiras dos carrinhos e no aeromodelismo é utilizado para controlar os flaps das asas dos aviões.
Ao utilizar o Micro Servo Motor SG90 9g é possível controlar o giro e a posição do mesmo através dos comandos enviados pela plataforma microcontrolada. Após o envio do comando para que o servo altere sua posição, o mesmo verifica sua posição atual e em seguida executa o comando girando até a posição indicada.
– Especificações e características:
– Modelo: SG90
– Marca do servo: Tower Pro
– Tensão de operação: 3 a 6VDC
– Posição (máxima): 180° de giro
– Material das engrenagens: nylon
– Temperatura de trabalho: -30º a 60º celsius
– Torque: 1,2 Kg/cm (4,8VDC) / 1,6 Kg/cm (6VDC)
– Aplicações:
Projetos com Arduino ou outras plataformas microcontroladas em que seja necessário movimentar partes de um robô, movimentar um braço robótico, virar as rodas dianteiras de um carrinho, controlar flaps das asas de aviões (aeromodelismo) e etc.
– Proposta da prática:
Utilizar o Micro Servo Motor SG90 9g em conjunto com o Arduino e girar o eixo do servo até 180º e em seguida retornar à 0º. Ao ligar o servo o eixo irá retornar à 0º independente da posição em que ele se encontra.
– Lista dos itens necessários:
01 – Arduino com Cabo USB
01 – Micro Servo Motor SG90 9g
03 – Cabos Jumper macho-macho
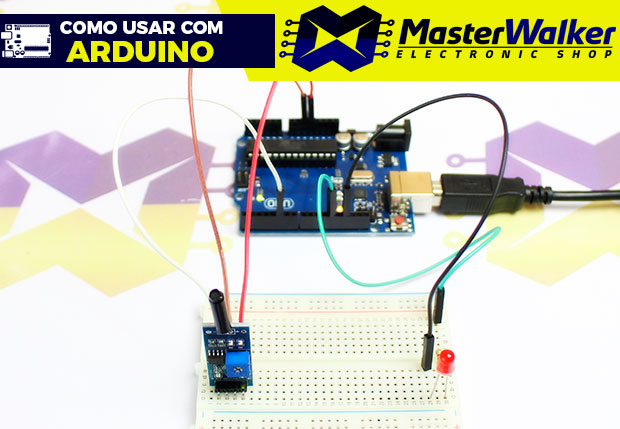
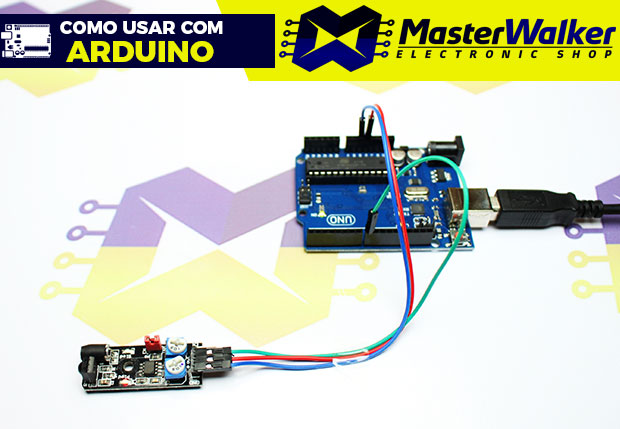
– Esquema de ligação da prática

– Tutorial de instalação e configuração do ambiente de programação do Arduino:
Arduino – Instalação e Configuração da IDE no Windows
– Código:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
#include <Servo.h> //INCLUSÃO DA BIBLIOTECA NECESSÁRIA const int pinoServo = 6; //PINO DIGITAL UTILIZADO PELO SERVO Servo s; //OBJETO DO TIPO SERVO int pos; //POSIÇÃO DO SERVO void setup (){ s.attach(pinoServo); //ASSOCIAÇÃO DO PINO DIGITAL AO OBJETO DO TIPO SERVO s.write(0); //INICIA O MOTOR NA POSIÇÃO 0º } void loop(){ for(pos = 0; pos < 180; pos++){ //PARA "pos" IGUAL A 0, ENQUANTO "pos" MENOR QUE 180, INCREMENTA "pos" s.write(pos); //ESCREVE O VALOR DA POSIÇÃO QUE O SERVO DEVE GIRAR delay(15); //INTERVALO DE 15 MILISSEGUNDOS } delay(1000); //INTERVALO DE 1 SEGUNDO for(pos = 180; pos >= 0; pos--){ //PARA "pos" IGUAL A 180, ENQUANTO "pos" MAIOR OU IGUAL QUE 0, DECREMENTA "pos" s.write(pos); //ESCREVE O VALOR DA POSIÇÃO QUE O SERVO DEVE GIRAR delay(15); //INTERVALO DE 15 MILISSEGUNDOS } } |
– Resultado final:
Gostou desta prática? Então deixa seu comentário, dúvida ou sugestão aí embaixo!
Loja online: https://www.masterwalkershop.com.br
Fan page no Facebook: https://www.facebook.com/masterwalkershop
Nos ajude a espalhar conhecimento clicando no botão de compartilhar (f Like) que está mais abaixo.
Obrigado e até a próxima!
Seu feedback é muito importante! Que tal dar uma nota para esta postagem?! Faça sua avaliação aqui embaixo.
Postagem anterior: Como usar com Arduino – Sensor Ultrasonico HC-SR04
Próxima postagem: Como usar com Arduino – Sensor PIR (Detector) de Movimento
Não entendi muito bem a utilidade do comando “attach” na linha 9, não seria mais simples definir direto o “s” na porta 6?
const int s = 6;
Sou iniciante no Arduino então pode parecer uma pergunta besta.
Olá Alan.
Agradeço pelo comentário!
O “attach” é uma função da biblioteca Servo.h que é utilizada no código.
É necessário informar a função em qual pino do Arduino o servo motor está conectado.
como baixa o código não estou achando a opção
Olá Eduardo.
Agradeço pelo comentário!
O código está disponível no texto e basta selecionar o mesmo e copiar.