
- Descrição: O Sensor de Corrente (AC e DC) ACS712 possibilita realizar…

Como usar com Arduino – Sensor de Cor TCS230 (TCS3200)
– Descrição:
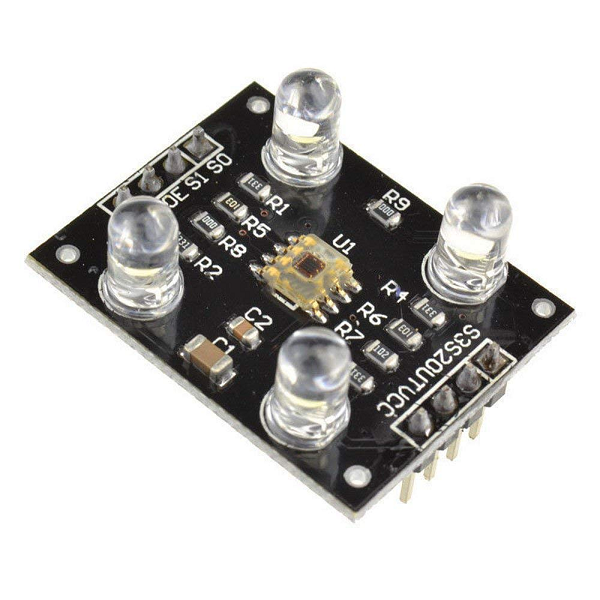
O Sensor de Cor TCS230 (TCS3200) é um módulo composto por 64 fotodiodos que são divididos da seguinte forma: 16 possuem filtros para a cor vermelha, 16 para a cor verde, 16 para a cor azul e 16 não possuem filtro. Além disso, o sensor possui quatro LEDs brancos para iluminação e oito pinos de conexão.
Os 64 fotodiodos estão distribuídos no Sensor de Cor TCS230 (TCS3200) uniformemente e são responsáveis por captar a luminosidade, filtrar as cores recebidas e em seguida gerar na saída do sensor um sinal de onda quadrada que traz informações sobre a intensidade das cores primárias (Red (Vermelho) / Green (Verde) / Blue (Azul)). A partir destas informações é possível verificar qual a cor que o sensor identificou.
– Especificações e características:
– Controlador: TCS230
– Tensão de operação: 3 a 5VDC
– Melhor faixa de detecção: 10mm
– Margem de erro típica: 0.2% a 50KHz
– Datasheet:
– Aplicações:
Projetos com Arduino ou outras plataformas microcontroladas em que seja necessário identificar cores de objetos.
– Proposta da prática:
1) Utilizar o Sensor de Cor TCS230 (TCS3200) em conjunto com o Arduino e inicialmente fazer a calibração do mesmo.
2) Fazer a leitura das cores dos objetos e em seguida registrar na EEPROM do Arduino os códigos das cores lidas e seus respectivos nomes.
3) Aproximar do sensor os objetos e aguardar o mesmo identificar as cores. A cor identificada será exibida no monitor serial do ambiente de programação do Arduino.
A calibração do sensor e a leitura das cores para armazenamento na EEPROM do Arduino são feitos a partir de comandos enviados pelo monitor serial do ambiente de programação do Arduino.
– Lista dos itens necessários:
01 – Arduino com Cabo USB
01 – Sensor de Cor TCS230 (TCS3200)
02 – Protoboard
08 – Cabos Jumper macho-macho
01 – Objetos de cores distintas
OBS: para montagem do sensor em protoboard serão necessárias 2 protoboards de 400 pontos ou 2 de 830 pontos, pois o espaçamento entre os contatos de 1 protoboard não é compatível com o espaçamento (de lado a lado) dos pinos do sensor.
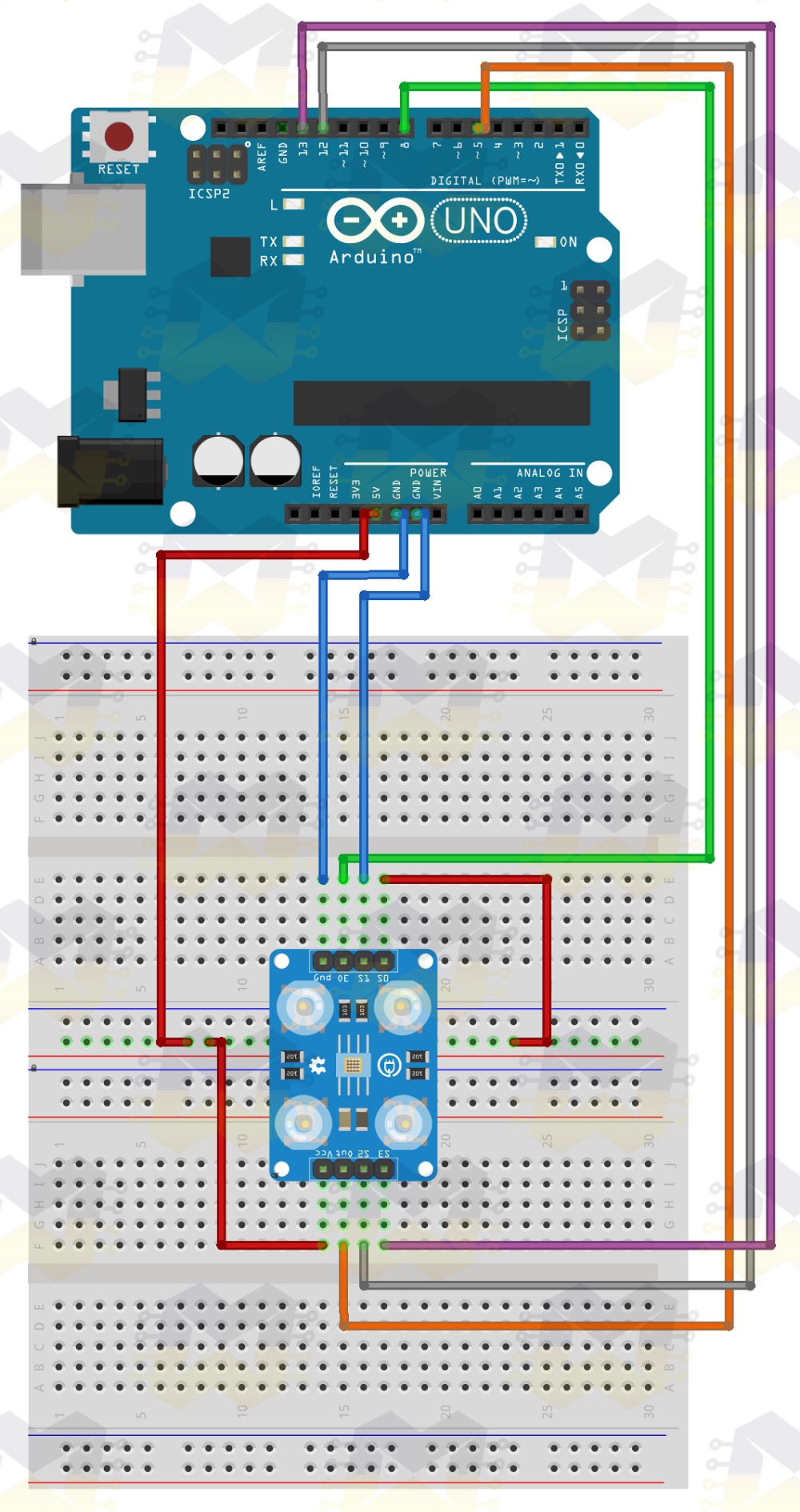
– Esquema de ligação da prática:
– Tutorial de instalação e configuração do ambiente de programação do Arduino:
Arduino – Instalação e Configuração da IDE no Windows
– Biblioteca:
– Importando bibliotecas para o ambiente de programação do Arduino:
Arduino – Importando bibliotecas para a IDE
– Código:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 |
#include <MD_TCS230.h> // colour sensor library #include <FreqCount.h> // used by above library #include <EEPROM.h> // Ensure data is still valid after power offs // Pin definitions #define S2_OUT 12 #define S3_OUT 13 #define OE_OUT 8 // LOW = ENABLED wh #define MAX_COLOURS 10 // Max colours allowed to store, 10 takes up 140 bytes #define MAX_COLOUR_NAME_CHARS 10 // Max chars allowed in name of colour #define TOLERANCE 35 // How far out the red,green or blue can be to match typedef struct { char Name[MAX_COLOUR_NAME_CHARS+1]; // Name for Colour, plus 1 extra for terminator '0' uint8_t Red,Green,Blue; // The colour values }SingleColour; SingleColour Colours[MAX_COLOURS]; // Our array of colours to match against uint8_t NumColours=0; // Current Number of colours MD_TCS230 CS(S2_OUT, S3_OUT, OE_OUT); void setup() { Serial.begin(9600); CS.begin(); // Check if we have some calibration data ReadCalibrations(); ReadColours(); } void loop() { static char Choice; Choice=MainMenu(); switch(Choice) { case '1': CalibrateSensor(); break; case '2': CalibrateColour(); break; case '3': DisplayColours(true); break; case '4': DeleteColour(); break; case '5': ClearEEPROMColours(); break; case '6': ClearCalibration(); case '7': ScanColour(); break; } } void ClearCalibration() { uint8_t DataIdx; EEPROM.put(DataIdx," "); DataIdx=3+sizeof(sensorData); EEPROM.put(DataIdx," "); Serial.println("\nSensor calibration cleared"); } void ClearEEPROMColours() { // Just reset number of colours to 0 uint16_t DataIdx; DataIdx=9+(2*sizeof(sensorData)); // Move past black and white calibration settings EEPROM.put(DataIdx,0); Serial.println("\nEEPROM colours cleared"); } void WriteColoursToEEPROM() { uint16_t DataIdx; DataIdx=6+(2*sizeof(sensorData)); // Move past black and white calibration settings EEPROM.put(DataIdx,"COL"); // Identifier DataIdx+=3; EEPROM.put(DataIdx,NumColours); DataIdx++; for(uint8_t i=0;i<NumColours;i++) { EEPROM.put(DataIdx,Colours[i]); DataIdx+=sizeof(SingleColour); } Serial.println("\nColours written to EEPROM\n"); } void WriteColourToEEPROM(uint8_t ColIdx) { uint16_t DataIdx; // index into data DataIdx=6+(2*sizeof(sensorData)); // Move past black and white calibration settings // Check if any colours written at all, if not then set it up if(((EEPROM.read(DataIdx)=='C')&(EEPROM.read(DataIdx+1)=='O')&(EEPROM.read(DataIdx+2)=='L'))==false) EEPROM.put(DataIdx,"COL"); // Identifier // Store the colour DataIdx=ColourEEPROMStartAddress(ColIdx); EEPROM.put(DataIdx,Colours[ColIdx]); } uint16_t ColourEEPROMStartAddress(uint8_t ColIdx) { // return address for this particular colour in the EEPROM // Broken down into steps so you can see how things are stored uint16_t DataIdx=0; DataIdx+=3; // Black calibration Identifier 'BLK' DataIdx+=sizeof(sensorData); //Black sensor data DataIdx+=3; // White calibration Identifier 'WHT' DataIdx+=sizeof(sensorData); //White sensor data DataIdx+=3; // 'COL' identifier to show valid colour data DataIdx+=1; // NUmber of colours // We are now at the start of the colours and this would be the first colour, simply multiply // the size of the colour data by the colidx DataIdx+=(ColIdx * sizeof(SingleColour)); return DataIdx; } void DeleteColour() { char ColourName[MAX_COLOUR_NAME_CHARS]; // Store of name int8_t ColIdx; Serial.print(F("\nEnter name for the colour to delete [Max ")); Serial.print(MAX_COLOUR_NAME_CHARS); Serial.print(" chars] followed RETURN\n\n"); GetColourName(ColourName); ColIdx=ColourIndex(ColourName); if(ColIdx==-1) { Serial.print(ColourName); Serial.print(F(" could not be found, returning to main menu\n")); return; } // To remove colour we just shuffle the colours around and reduce the count by 1 ShuffleColoursDown(ColIdx); Serial.print(F("\nThe colour ")); Serial.print(ColourName); Serial.print(F(" has been removed\n")); WriteColoursToEEPROM(); } void ShuffleColoursDown(uint8_t ColIdx) { // All colours above ColIdx are move down one position, effectivly removing the colour at ColIdx for(uint8_t i=ColIdx+1;i<NumColours;i++) { strcpy(Colours[i-1].Name,Colours[i].Name); Colours[i-1].Red=Colours[i].Red; Colours[i-1].Green=Colours[i].Green; Colours[i-1].Blue=Colours[i].Blue; } NumColours--; // one less colour } char MainMenu() { char Choice; Serial.print(F("\nCalibration Menu (Choose option and press RETURN)\n")); Serial.print(F("1 Calibrate sensor\n")); Serial.print(F("2 Add/Update colour\n")); Serial.print(F("3 Display colours\n")); Serial.print(F("4 Delete colour\n")); Serial.print(F("5 Delete all colours\n")); Serial.print(F("6 Clear sensor calibration settings\n")); Serial.print(F("7 Scan Colour\n")); return getChar(); } void ScanColour() { // Scan and find a colour on the sensor colorData rgb; CS.read(); while(CS.available()==0); // wait for read to complete CS.getRGB(&rgb); int8_t ColIdx=MatchColour(&rgb); Serial.print(F("\nScanning for RGB[")); Serial.print(rgb.value[TCS230_RGB_R]); Serial.print(F(",")); Serial.print(rgb.value[TCS230_RGB_G]); Serial.print(F(",")); Serial.print(rgb.value[TCS230_RGB_B]); Serial.print(F("]\n")); if(ColIdx==-1) Serial.println("\nNo match found"); else { Serial.print("\nThat colour is "); Serial.print(Colours[ColIdx].Name); Serial.print(" ["); Serial.print(Colours[ColIdx].Red); Serial.print(F(",")); Serial.print(Colours[ColIdx].Green); Serial.print(F(",")); Serial.print(Colours[ColIdx].Blue); Serial.println("]"); } } int8_t MatchColour(colorData *rgb) { // Look through colours looking for a match uint8_t Idx=0; bool Found=false; while((Idx<NumColours)&(Found==false)) { if((CheckColour(rgb->value[TCS230_RGB_R],Colours[Idx].Red)) &(CheckColour(rgb->value[TCS230_RGB_G],Colours[Idx].Green))&(CheckColour(rgb->value[TCS230_RGB_B],Colours[Idx].Blue))) Found=true; Idx++; } if(Found) return Idx-1; else return -1; } bool CheckColour(uint8_t ScanCol, uint8_t StoredCol) { // returns true if matched on this single colour else false int16_t StoreColLow,StoreColHigh; StoreColLow=StoredCol-TOLERANCE; StoreColHigh=StoredCol+TOLERANCE; if(StoreColLow<0) StoreColLow=0; if(StoreColHigh>255) StoreColHigh=255; return ((ScanCol>=StoreColLow)&(ScanCol<=StoreColHigh)); } void DisplayColours(bool ShowTitle) { // List all the current colours (not nessasarily saved back to EEPROM yet char ColStr[4]; //Temp store for the integer colour value to a string for formatted printing if(NumColours==0) { Serial.print("No current colours stored in RAM memory\n"); return; } if(ShowTitle) Serial.print("\nCurrent colours stored in RAM memory\n"); Serial.println("Name Red Green Blue"); for(uint8_t i=0;i<NumColours;i++) { OutputPadded(Colours[i].Name,MAX_COLOUR_NAME_CHARS); Serial.print(" "); itoa(Colours[i].Red,ColStr,10); OutputPadded(ColStr,3); Serial.print(" "); itoa(Colours[i].Green,ColStr,10); OutputPadded(ColStr,3); Serial.print(" "); itoa(Colours[i].Blue,ColStr,10); OutputPadded(ColStr,3); Serial.println(); } } void ReadColours() { // Read in any colour data uint16_t DataIdx; // index into data DataIdx=6+(2*sizeof(sensorData)); // Move past black and white calibration settings if((EEPROM.read(DataIdx)=='C')&(EEPROM.read(DataIdx+1)=='O')&(EEPROM.read(DataIdx+2)=='L')) { // Valid colour data DataIdx+=3; // How many colours stored EEPROM.get(DataIdx,NumColours); if(NumColours==0) { Serial.println("No colours stored in EEPROM\n"); return; } if(NumColours>MAX_COLOURS) { Serial.print(F("Number of colours (")); Serial.print(NumColours); Serial.print(F(") exceeds maximum of ")); Serial.print(MAX_COLOURS); Serial.print(F(",only first ")); Serial.print(MAX_COLOURS); Serial.print(F(",will be read in.")); NumColours=MAX_COLOURS; } DataIdx++; for(uint8_t i=0;i<NumColours;i++) { EEPROM.get(DataIdx,Colours[i]); DataIdx+=sizeof(SingleColour); } Serial.println("Colours read in from EEPROM\n"); DisplayColours(false); } else Serial.println(F("No Colour data stored")); } void ReadCalibrations() { uint16_t DataIdx; sensorData sd; // If we find some calibration data then calibrate sensor if((EEPROM.read(0)=='B')&(EEPROM.read(1)=='L')&(EEPROM.read(2)=='K')) { // Black Calibration data present EEPROM.get(3, sd); CS.setDarkCal(&sd); Serial.print("Black Calibration read in, "); } else Serial.print("No black calibration data, "); DataIdx=3+sizeof(sensorData); if((EEPROM.read(DataIdx)=='W')&(EEPROM.read(DataIdx+1)=='H')&(EEPROM.read(DataIdx+2)=='T')) { // white Calibration data present EEPROM.get(DataIdx+3, sd); CS.setWhiteCal(&sd); Serial.println("White Calibration read in."); } else Serial.println("No white calibration data"); } void CalibrateSensor() { uint16_t DataIdx; sensorData sd; Serial.print(F("\n****** Calibrate sensor ******\n")); Serial.print(F("Put black matt object over sensor, then press any key followed by RETURN\n")); getChar(); CS.read(); while(CS.available()==0); // wait for read to complete CS.getRaw(&sd); CS.setDarkCal(&sd); // Store this sensor black data EEPROM.write(0,'B');EEPROM.write(1,'L');EEPROM.write(2,'K'); // This acts as as simple indicator EEPROM.put(3,sd); Serial.print(F("Put white object over sensor, then press any key followed by RETURN\n")); getChar(); CS.read(); while(CS.available()==0); // wait for read to complete CS.getRaw(&sd); CS.setWhiteCal(&sd); DataIdx=3+sizeof(sensorData); // Store white data after black data EEPROM.write(DataIdx,'W');EEPROM.write(DataIdx+1,'H');EEPROM.write(DataIdx+2,'T'); // This acts as as simple indicator EEPROM.put(DataIdx+3,sd); Serial.print(F("Calibration of sensor complete.\n\n")); } void CalibrateColour() { colorData rgb; uint16_t DataIdx; char ColourName[MAX_COLOUR_NAME_CHARS]; // Store of name int8_t ColIdx; char Choice; // Serial.print(F("Enter name for colour [Max ")); Serial.print(MAX_COLOUR_NAME_CHARS); Serial.print(" chars] followed RETURN\n"); GetColourName(ColourName); ColIdx=ColourIndex(ColourName); if(ColIdx>=0) { Serial.print(F("\nWARNING: The colour ")); Serial.print(ColourName); Serial.print(F(" already exists, overwrite (Y/N)\n")); if(toupper(getChar())!='Y') { Serial.print(F("\nColour calibration abandoned\n")); return; } } if(ColIdx==-1) { // Check if can add a new colour if(NumColours==MAX_COLOURS) { Serial.print(F("\nWARNING: There is no room left for new colours, you have reached the maximum of ")); Serial.print(NumColours); Serial.print(F(" colours\n\n")); Serial.print(F("You will need to delete a colour first to make room.\n\n")); return; } } Serial.print(F("Reading Color '")); Serial.print(ColourName); CS.read(); while(CS.available()==0); // wait for read to complete CS.getRGB(&rgb); Serial.print(F("\nRGB is [")); Serial.print(rgb.value[TCS230_RGB_R]); Serial.print(F(",")); Serial.print(rgb.value[TCS230_RGB_G]); Serial.print(F(",")); Serial.print(rgb.value[TCS230_RGB_B]); Serial.print(F("]\n")); if(ColIdx==-1) ColIdx=NumColours; // If not already stored set to next available colour slot strcpy(Colours[ColIdx].Name,ColourName); Colours[ColIdx].Red=rgb.value[TCS230_RGB_R]; Colours[ColIdx].Green=rgb.value[TCS230_RGB_G]; Colours[ColIdx].Blue=rgb.value[TCS230_RGB_B]; if(ColIdx==NumColours) // If same then added a new colour, increase the numcount { NumColours++; DataIdx=9+(2*sizeof(sensorData)); // Move past black and white calibration settings and 'COL' marker EEPROM.put(DataIdx,NumColours); // Write new total to EEPROM } WriteColourToEEPROM(ColIdx); } int8_t ColourIndex(char *ColourName) { // Looks through the colours to see if this colour already exists, if so returns it's index pos in the array // else returns -1 int8_t Idx=0; bool Found=false; if(NumColours==0) return -1; while((Idx<NumColours)&(Found==false)) { if(strcasecmp(Colours[Idx].Name,ColourName)==0) Found=true; else Idx++; } if(Found) return Idx; else return -1; } void GetColourName(char *ColourName) { uint8_t NameLength=0; while (Serial.available() == 0); // Wait for some chars NameLength=Serial.readBytes(ColourName,MAX_COLOUR_NAME_CHARS); // Read them in ColourName[NameLength]=0; // terminate string } char getChar() // Wait for user to return a char over serial connection, returns uppercase version of any alpha char { while (Serial.available() == 0) ; return(toupper(Serial.read())); } void OutputPadded(char *Str,uint8_t AmountToPad) { // outputs the colour name post padded with spaces so that it will be a maximum of MAX_COLOUR_NAME_CHARS chars in total // This is used to create a more pleasant tidy display when listing colours uint8_t Amount=AmountToPad-strlen(Str); Serial.print(Str); while(Amount>0) { Serial.print(" "); Amount--; } } |
1) O sensor pode sofrer interferência de luz externa, logo, o ideal é que você faça uma espécie de isolação e deixe visível para o sensor somente o objeto que será identificado a cor. Recomendo que faça um compartimento para alocar o sensor e deixe apenas um furo central na parte de cima deste compartimento de forma que o objeto a ser identificado a cor possa ficar visível ao sensor.
2) Calibração: após carregamento do código no Arduino, abra o monitor serial e um menu de opções será exibido. Digite 1 na entrada de dados do monitor serial e clique em enviar. Em seguida na serial será exibida uma mensagem solicitando que seja aproximado do sensor um objeto de cor preta. Aproxime o objeto de cor preta, digite qualquer letra na entrada de dados do monitor serial e clique em enviar ou pressione ENTER. Novamente será exibida uma mensagem na serial, porém, solicitando que seja aproximado do sensor um objeto de cor branca. Aproxime o objeto de cor branca, digite qualquer letra na entrada de dados do monitor serial e clique em enviar ou pressione ENTER.
3) Leitura das cores: escolha objetos de cores distintas para que o sensor possa fazer a leitura do código RGB. Coloque o objeto sobre o furo do compartimento que está isolando o sensor e na entrada de dados do monitor serial digite 2 e em seguida clique em enviar ou pressione ENTER. Uma mensagem será exibida solicitando que você digite na entrada de dados da serial um nome para a cor que foi lida. Digite o nome e em seguida clique em enviar ou pressione ENTER para que o nome juntamente com o código RGB seja guardado na memória EEPROM do Arduino. Siga este mesmo procedimento para todos os objetos que forem lidos pelo sensor.
4) Escolha um dos objetos que foram lidos anteriormente, coloque o objeto sobre o furo do compartimento que está isolando o sensor e na entrada de dados do monitor serial digite 7 e em seguida clique em enviar ou pressione ENTER. Uma mensagem será exibida informando o código RGB e o nome da cor que foi reconhecida. Siga este mesmo procedimento para os demais objetos.
5) Ao escanear a cor do objeto (procedimento 4 mencionado acima), você irá observar que os códigos RGB mostrados após o sensor identificar a cor, poderão ser diferentes dos códigos que o mesmo reconheceu anteriormente e armazenou na EEPROM do Arduino, contudo, ele vai mencionar corretamente o nome da cor que você salvou anteriormente (procedimento 3). Isto ocorre, pois existem as cores que são chamadas de matriz, e dentro de cada matriz é possível ter uma grande variação de outras cores. Exemplo: a cor verde é uma matriz e temos a cor jade que é uma variação dentro desta matriz. A cor azul é uma matriz e temos a cor azul marinho que é uma variação dentro desta matriz.
6) Mesmo desligando o Arduino, os códigos RGBs e os nomes das cores ficarão salvos na EEPROM / ROM (memória que armazena permanentemente os dados).
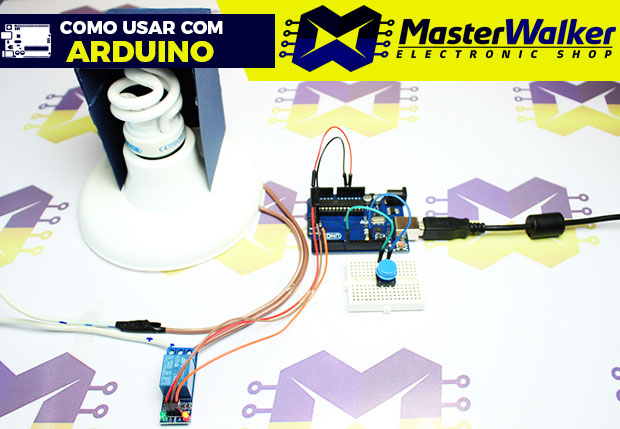
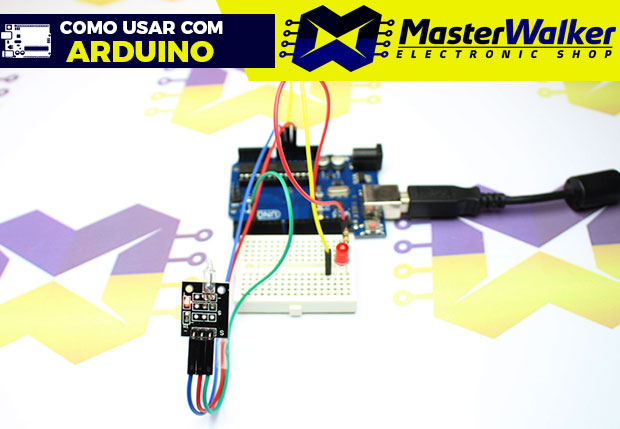
– Resultado final:
OBS: esta prática foi uma reprodução um tutorial publicado no site XTronical.
Gostou desta prática? Então deixa seu comentário, dúvida ou sugestão aí embaixo!
Loja online: https://www.masterwalkershop.com.br
Fan page no Facebook: https://www.facebook.com/masterwalkershop
Nos ajude a espalhar conhecimento clicando no botão de compartilhar (f Like) que está mais abaixo.
Obrigado e até a próxima!
Seu feedback é muito importante! Que tal dar uma nota para esta postagem?! Faça sua avaliação aqui embaixo.
Postagem anterior: Sonoff Compatível com o Homekit / App Casa (Apple iPhone iPad iOS)
Próxima postagem: Blynk – Utilizando com o Módulo Ethernet ENC28J60 e Arduino
Olá. Tô tentando usar o sensor com esse código, mas não tô conseguindo calibrar. Não dá tempo de fazer a leitura da cor preta pq ele pede a cor preta e a cor branca ao mesmo tempo
Quando eu coloco a cor preta, clico em qualquer tecla e dou enter, já termina a calibração, pois o serial já pulou pra segunda etapa. O que pode ser?
como encontro esse sensor no fritzing? não encontro na aba de componentes
Olá, tudo bem?
Qual o software utilizado para fazer a representação? Não consigo encontrar o sensor de cor no ThinkerCad.
Olá Laura.
Agradeço pelo comentário!
Utilizamos o Fritzing.
Como fica a ligação para um TCS3200 de 5 pinos cada lado?
Olá Gerson.
Agradeço pelo comentário!
Este de 5 pinos nunca utilizei, logo, não consigo te orientar, mas veja o link abaixo:
https://www.hackster.io/MakerRobotics/color-sensor-gy-31-6b5f75
Boa tarde, tudo bem?
Tenho um projeto num ESP32 e tentei aplicar essa programação nele, porém deu erro de biblioteca (FreqCount). Teria alguma outra biblioteca que pudesse contar a frequência que não seja essa?
Abraço.
Olá, gostaria de saber também. Não consegui
Olá tudo bem? Não estou conseguindo realizar a calibração, no monitor serial aparece para inserir o objeto preto e branco ao mesmo tempo? Você sabe como eu posso resolver?
Boa tarde.
Sou inexperiente em Arduino. E estou tentando usar a programação de vcs para sensor RGB, e não consigo carregar pois está dando erro “MD_TCS.h:No such file or directory”.
E não sei oque fazer. Gostaria de uma ajuda se possível.
Olá William.
Agradeço pelo comentário!
No tutorial há links para download das bibliotecas necessárias para execução do código.
Este erro que está recebendo é comum quando não é feito a instalação de bibliotecas necessárias para compilação do código na placa.